Rotational Mechanics
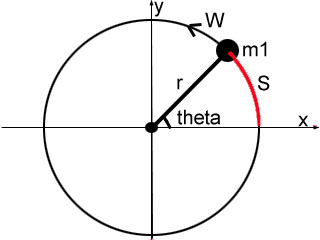
Fig. 1
Fig. 1 depicts a moving body of mass m1 rotating counterclockwise at angular velocity W around an axis at distance r. Theta is the angular position of body m1, at time t.
Some relationships can be derived from this arrangement:
S= r * theta (1) ;theta must be given in radians !
W= 2 * Pi * f, (2) ; where f is the number of rotations per second
Since the length of the circumference is given by 2* Pi * r , if we want to know
the velocity of the body, we can say:
V= 2 * Pi * r * (1/t) ; V is the tangential velocity of the body.
V = 2 * Pi * r * f
V = 2 * Pi * f * r = W*r (3)
If f is constant, then W is constant, but we still have acceleration.This acceleration, (Acp), is responsible for the change in direction of the body m1.
The centripetal acceleration Acp is given by:
Acp= W^2 * r (4)
From (3) we can say that:
W = V/r (5)
Acp = (V/r)^2 * r = V^2/r (6)
Since there is acceleration, there is force. This force called centripetal force is given by:
F= m1 * Acp, then -> F = m1 * W^2 * r (7)
The centripetal force is the force that the axis imposes on the body m1 to change its direction.But, according to Newton, every action produces a reaction of equal magnitude but in the opposite direction. This opposite reaction, the force that the body imposes on the axis, is called centrifugal force. Its magnitude is obviously given by the same expression in (7), and it acts radially outwards. The best way to visualize this force is by separating its Cartesian components:
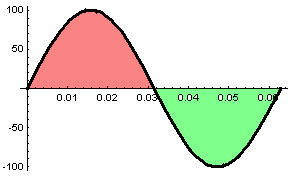
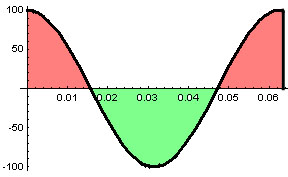
F * Sin(theta ) ; The Y component F * Cos(theta) ; The X component.
The red area represents the positive impulse of the force. The green area is the negative impulse.
We can see that they are equal, but symmetric to zero. This will cause the total impulse to be ZERO.
An interesting observation in this case is that the F Sin(theta) alone (without the interference of any other force) would produce linear displacement. The direction of movement would be dependent of the initial conditions at the time the force begins to act. Also, the body would accelerate to maximum speed and then decelerate to zero. If any other force action exists the resulting motion would be an oscillation. This is because the two impulses are time dephased, so only after the body reacts to the complete first impulse (red), will it react to the second one (green). Note that the presence of the F Cos(theta) would impede this behavior. So the described behavior is only valid if no other force besides F Sin(theta) is acting on the system.
See here the mathematical proof.
Now let's introduce angular acceleration into the problem. This means that the angular velocity, (W), will not be constant anymore. The angular velocity can only vary if one of three things happens:
The angular velocity W, will then depend of the angular acceleration alpha, and will be given by:
W= W0 + alpha * t (8) ;W0 is the initial angular velocity.
The angular position theta, will also be given as a function of alpha:
theta = theta0 + W0 * t + 0.5 * alpha * t^2 (9) ; theta0 is the initial angular position.
If a change in alpha is caused by a change in velocity V of the body, then a tangential acceleration will exist. This acceleration will be the result of a force acting in the body. This force will be given by:
Ft = m1 * r * alpha ( 10 )
The product of this force by the radius r will give us the torque Tq:
Tq= m1 * r^2 * alpha ( 11 )
m1 * r^2 is the body's moment of inertia I, Therefore :
Tq = I * alpha ( 12 )